We focus on the problem of synthesizing grasps for
multi-finger robot hands that, given a target object's
geometry and pose, computes a hand configuration.
Existing approaches often struggle to produce reliable grasps
that sufficiently constrain object motion, leading to
instability under disturbances and failed grasps.
A key reason is that during grasp generation, they typically
focus on resisting a single wrench, while ignoring
the object's potential for adversarial movements, such as escaping.
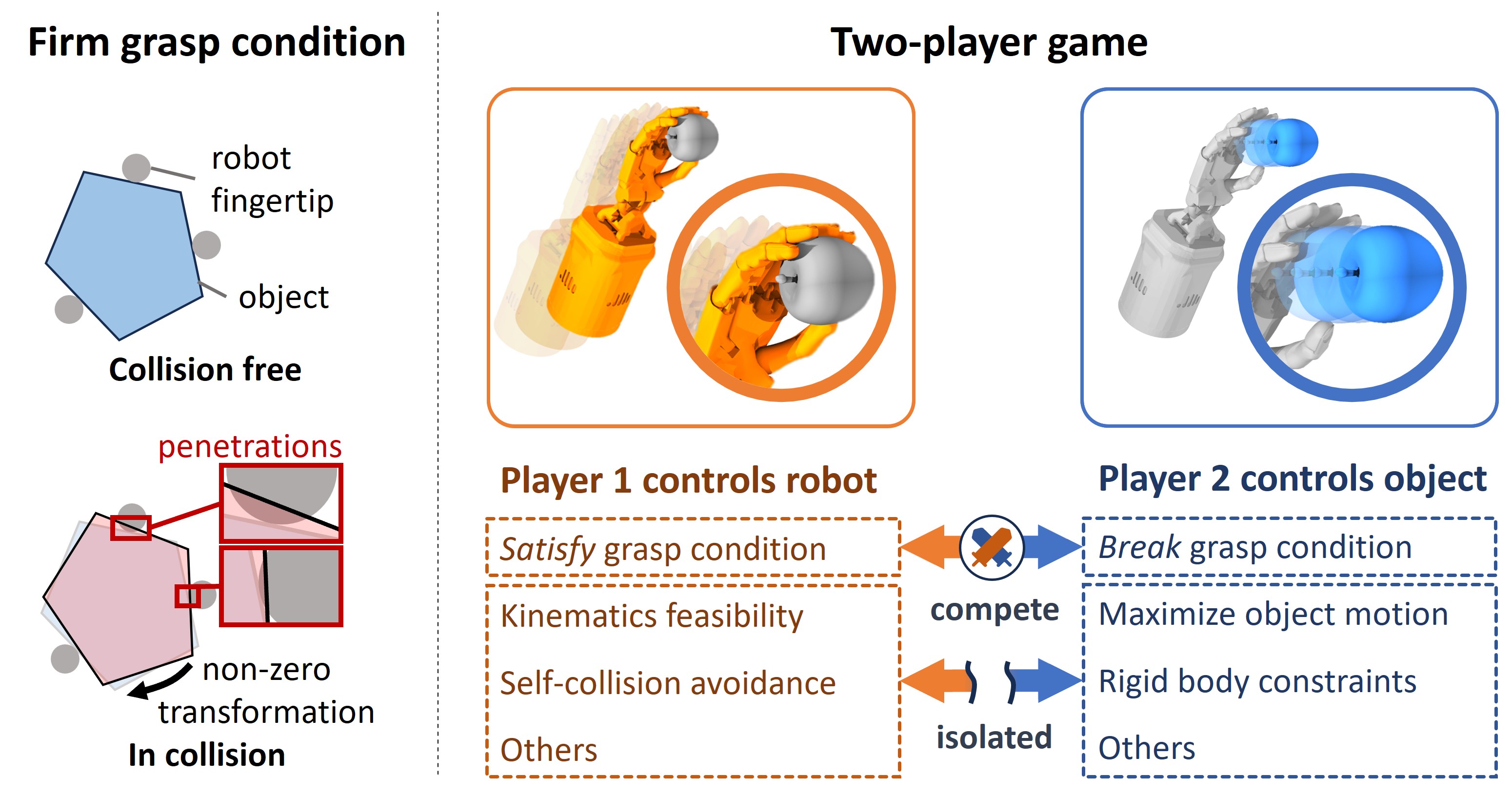
We propose a new grasp-synthesis approach that explicitly captures and leverages
the adversarial object motion in grasp generation by formulating the problem as a two-player game.
One player controls the robot to generate feasible grasp configurations, while the other
adversarially controls the object to seek motions that attempt to escape from the grasp.
Simulation experiments on various robot platforms and target objects show that our approach
achieves a success rate of 75.78%, up to 19.61% higher than the state-of-the-art baseline.
The two-player game mechanism improves the grasping success rate by 27.40% over the method without the game formulation.
Our approach requires only 0.28-1.04 seconds on average to generate a grasp configuration, depending on the robot platform,
making it suitable for real-world deployment.
In real-world experiments, our approach achieves an average success rate of 85.0% on ShadowHand and 87.5% on LeapHand,
which confirms its feasibility and effectiveness in real robot setups.